
The cargo bike of the future has an electric motor, that much is clear. But it will also pick you up at a place of your choice and later drive itself back to a charging station. At least that’s what Dr.-Ing. Tom Assmann from the Institute for Logistics and Material Flow Technology at Otto von Guericke University in Magdeburg thinks is technically feasible. Together with the Autonomous Bicycles Research Group, he is researching the topic of “autonomous driving”. His vision is a bike sharing system with self-driving e-cargo bikes. In an interview with Elektrofahrrad24, he talks about the ambiguity of standing still and other scientific challenges.
Mr Assmann, many of us have heard of autonomous driving. What is your research project about?
At Otto von Guericke University in Magdeburg, we are researching the “Autonomous Rad” project, or “AuRa”* for short. Electric cargo bikes are equipped with autonomous driving functions to enable the next level of bike sharing.
What exactly can we imagine in this context?
Imagine you are out and about in any city and realise you want to use a cargo bike. Normally you have to look where there is one and then walk there. We want to simplify that. In the end, you should just be able to take the app, order the bike and it will ride to you. And then, that’s essential, you ride the bike on your actual route by yourself. When you arrive at your destination, you get off and finish the ride.

This is how the researchers envision the structure of a bike-sharing system with self-driving e-cargo bikes.
What happens to the bike?
It will then ride by itself to the next customer. Or it heads for a suitable stopping point and parks there elegantly, so that no other people or vehicles taking part in the traffic are obstructed.
That sounds quite futuristic. For what reasons did you choose this research topic?
The motivation comes from two directions. On the one hand, our team includes technicians who want to develop autonomous driving functions. That opens up an enormously large field of research. Especially if you want to do things differently than with cars, where people are classified as a disruptive factor by the system. In contrast, our bike should interact with everyone who is on the road every day. As a task, let’s just take the passage through a pedestrian zone as an example.
And what is the second motivation?
Basically, it is the realisation that we need to switch from cars to bicycles. If we want to respond to climate change and achieve the 1.5 degree target, it is not enough to wait until only autonomously controlled cars drive through the cities. Science is pretty unanimous that this will lead to higher energy consumption, more traffic and more CO2 emissions. Bicycles are the much more environmentally friendly and people-friendly variant of autonomously driven vehicles in attractive cities of the future.
What kind of e-cargo bike does a bike-sharing model need that you are thinking of?
We work with three-wheeled e-cargo bikes whose front axle tilts while riding. In terms of dynamics, this is very similar to a regular bike. The fact that it has three wheels also means that it doesn’t tip over.
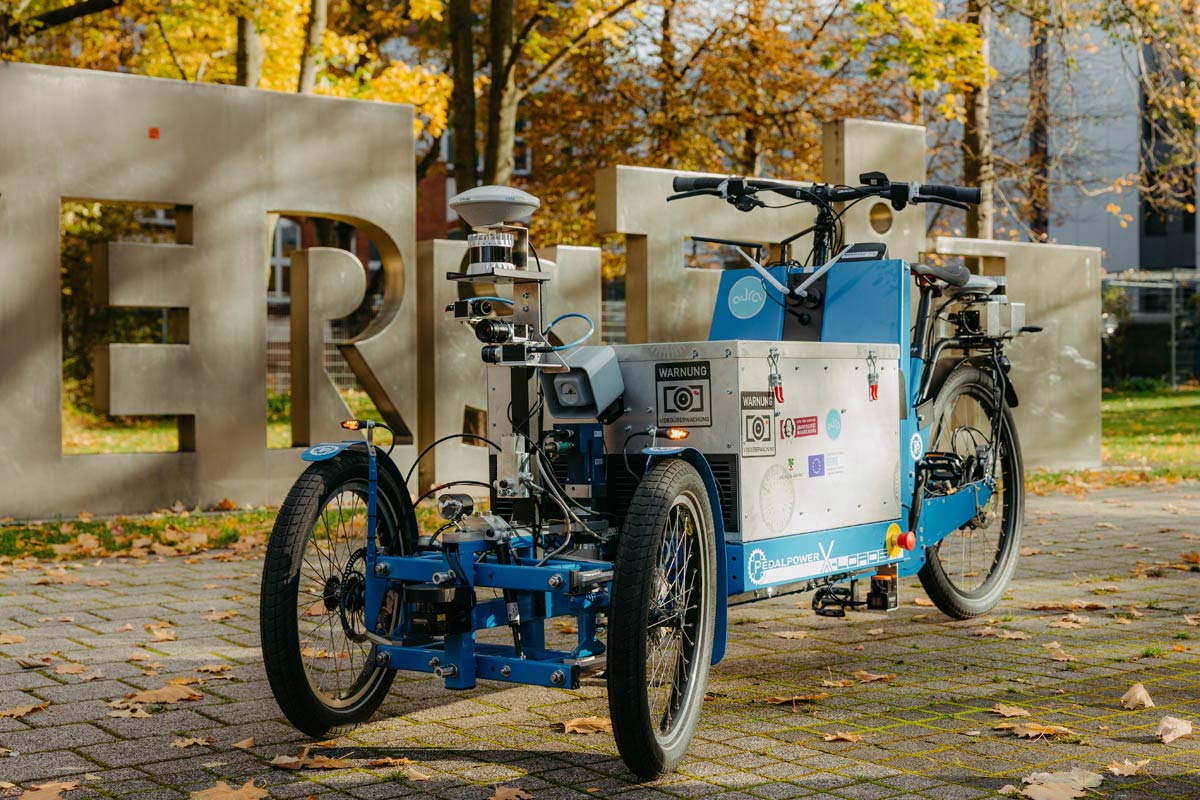
The prototype of the e-cargo bike for the research project “Autonomous Rad” (AuRa) is packed with measurement technology. If the model ever goes into series production, it will look significantly different.
It’ s a long way from not tipping over to being able to ride, though, isn’t it?
That’s right. After all, the e-cargo bike will not only be able to ride on bike lanes, but also on pavements where cycling is allowed and in side streets. So, the prerequisite is a dynamic speed range. Depending on the traffic situation, it should be able to go slow or faster by itself.
What about the people it encounters?
Colleagues from the field of environmental psychology have already conducted initial, very exciting experiments on this. In fact, we are talking about a situation that is still very unusual today. I am standing, walking or riding and suddenly a self-driving bicycle comes along. After a period of getting used to it, people can even handle it relatively quickly. However, the question is at least as exciting when such a bicycle is simply standing there. Is it parking or is it about to ride off? We have to solve such things. How does this vehicle signal to its surroundings what it is doing or about to do? At this point we are really entering new territory.
Okay, so people have to be prepared for this in some way. What else is needed?
Continuous bike lanes would be enormously helpful. Ideally two metres wide to allow safe overtaking and side-by-side cycling. Especially at intersections, the bike lane should also be appropriately designed. A self-driving bicycle does something that many people cannot do: It strictly adheres to the traffic rules at all times.
Sounds like a good thing.
And it is. Nevertheless, here’s an example that I’m sure many people are familiar with: You are cycling on a bike lane and it suddenly ends. Or the signage doesn’t exactly match the routing of the bike lane. People simply look to see where the lane actually continues. An autonomous vehicle needs specific solution strategies for this. They must go beyond the simple definition: Stubbornly follow every rule. Therein lies one of the greatest challenges of all our work.
Is there nothing that defuses this dilemma a little?
At least we benefit from the fact that the vehicle is allowed to take detours in autonomous mode. The choice of the absolute shortest route plays a subordinate role when riding to the next job or to the charging station. Our top priority is that the vehicle should be at the desired location within ten minutes. In a reliable manner.
How many stations would be needed in a city like Magdeburg, with its population of around 240,000, to meet this requirement?
We are currently researching this with the logistics team. The answer to this question is part of an even more important question: Is such a bike-sharing system even a worthwhile business model? Does autonomous driving save enough money compared to the costly distribution of countless bicycles? This is where we are at the moment, but without conclusive results.
How far away are we from such a system in terms of time?
At least five to ten years. We assume that this also applies to autonomously driving car fleets in European cities.

Project director Dr.-Ing. Tom Assmann from the Institute of Logistics and Material Flow Technology at Otto von Guericke University in Magdeburg
In your view, what are the advantages of autonomous bike sharing?
With current solutions, we are talking about rental bikes and e-scooters, for example. Scooters are lying around on every corner, but I’m not particularly fast with them. Rental bikes are usually a bit further away. So sometimes you take the scooter and ride it to the rental bike. I don’t need this diversions if the bike comes to me. In addition, thanks to autonomy, I can link rental bikes even better with public transport. Then I can sit in the tram and have a bicycle ridden to the stop where I want to get off. Using it, I can then cycle the last part of the way to my actual destination. Of course, I can also start my journey in this way. The rental bike comes to the front door and I ride it to the stop. Bike-sharing does not provide this yet.
You said it yourself, we’ll have to wait a few more years until then. What’s next on your research agenda until then?
In spring, we’ll be testing in public spaces here in Magdeburg. Depending on how successful that goes, further development steps will follow.
Are interested parties outside the scientific community already observing the project?
At the moment, everything is still happening within the university. However, we are already working with partners from industry. At the same time, we are in close exchange with a number of players in the bike sharing market. There is definitely interest from outside.
Thank you very much for the interview, Mr Assmann.
* Funded by the European Regional Development Fund (ERDF) and the Federal State of Saxony-Anhalt
Pictures: OVGU/Jana Dünnhaupt


